
we built these bots with lots of time and effort
LINE RIDER
The challenge is to make the robot follow a painted black line on the ground.for this project line rider our prototype has 2 engines in the back and a swivel wheel in the front so it can turn on a dime. The L.E.D light is place directly in front of the swivel so it can pick up lines easier.
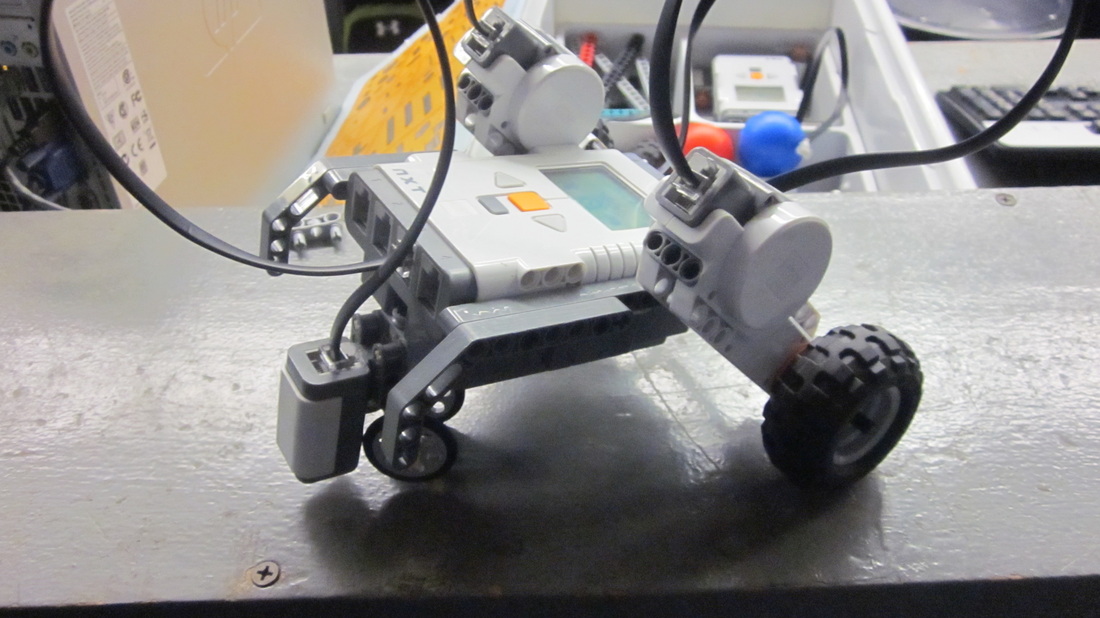
this was our first prototype for the line rider challenge. And this prototype was very sucessful and we will make slight modifications to it.
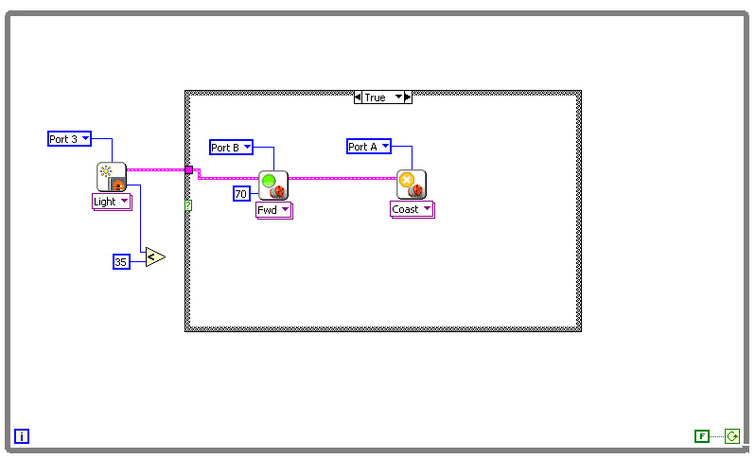
this is our program that is designed to follow a black solid line painted on the floor. While one motor is on the other is coasting if one engine bring the bot off course the other engine will turn on and bring it back on course
This is our video of the line rider robot.
PORTFOLIO GUIDE REFLECTION
1. State the assignment (problem/project) in your own words.
this assignment is to create a robot that has the ability to follow a line and a rattle snake bot
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
A very important input factor for the line rider robot is that you need to understand how to program it. It can become difficult because all of the loop connections. But if you understand completley how to do the program u can become successful.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
In order to complete the line rider robot first we had to create a robot with the ability to just go foward and turn on a dime. Then we attach the L.E.D light to the front and programed it correctly.
4. Describe the final output / product in detail: (what are we looking at?)
The final output is a kart with the ability to turn on a dime
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
The feedback that i had gotton is the positioning of the L.E.D light. I first put it on the side, but that positioning was not very accurate. So we had then put it on the front and the results changed
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc? ,
What i learned the most is different types of programs
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
I wouldnt change a thing our kart and program was very successful because it followed the line and never went off course
this assignment is to create a robot that has the ability to follow a line and a rattle snake bot
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
A very important input factor for the line rider robot is that you need to understand how to program it. It can become difficult because all of the loop connections. But if you understand completley how to do the program u can become successful.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
In order to complete the line rider robot first we had to create a robot with the ability to just go foward and turn on a dime. Then we attach the L.E.D light to the front and programed it correctly.
4. Describe the final output / product in detail: (what are we looking at?)
The final output is a kart with the ability to turn on a dime
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
The feedback that i had gotton is the positioning of the L.E.D light. I first put it on the side, but that positioning was not very accurate. So we had then put it on the front and the results changed
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc? ,
What i learned the most is different types of programs
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
I wouldnt change a thing our kart and program was very successful because it followed the line and never went off course

this is our rebuilt kit
