
angles of board- top 53 degrees
second largest 48 degrees
third largest - 32 degrees
smallest- 17 degrees-
second largest 48 degrees
third largest - 32 degrees
smallest- 17 degrees-

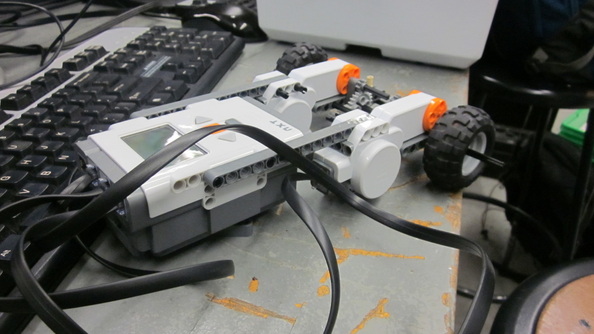
for this picture my group has choosen to do a tracter pull style with three motors in the front and 2 free wheels in the back. Causeing all of the weight to be in the front so it will go up the ramp much easier. This is our 3rd prototype for this challenge and the first 2 have failed from lack of weight in the front. so for this prototype all of the weight is in the front. this prototype could only go up to 32 degrees.
for this prototype we have changed a few things. this is the beginning of our building process. Instead of having the 3 engines in the front we have decided to spread the weight evenly throughout the robot. Also we ar going to have 2 engines in the back and 1 engine in the front. We decided to go with this style because my group feels as though this style might be better than our last prototype.

this is the last design that we are going to do. this has been by far the most successful prototype yet. It has made it up the 48 degree angle very easily. we attempted to do the 52 angle board, we almost had it but from the lack of traction we were not able to get up the board. This proto type consits of 2 engines in the back and 1 engine in the front. We have the slowest yet strongest gear ratio as well.
